 (1.1-2)
(1.1-2) |
| Figure 1.2-1 壓力與黏滯力 |
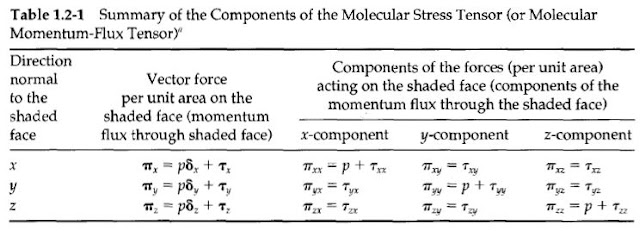
當流體內有速度梯度時 (velocity gradients),黏滯力始存在。Figures 1.2-1a,b,c 的三個陰影面積所受的黏滯力分別為向量 τx、τy、τz (均與受力平面有一夾角),這三個向量均有其分量,例如, τx 有分量 τxx、τxy、τxz。Table 1.2-1 匯整分子應力張量 (molecular stress tensor) 的各分量,包括熱力學壓力 (thermodynamic pressure) 和黏滯應力 (viscous stresses)。為了方便起見,分子應力 πij 被定義為兩者的相加,即
(i) πij = pδij + τij 表示 j 方向的黏滯力作用於垂直於 i 方向的單位面積,此力是位於較小 xi 區域的流體作用於較大 xi 的流體。這種解釋方法常用於描述流體施力於固體表面。
(ii) πij = pδij + τij 表示正 i 方向之 j 方向黏滯動量通量,此動量是自較小 xi 區域傳向較大 xi 區域。
πxx = p + τxx、πyy = p + τyy、πzz = p + τzz 稱為正向力 (normal stresses),其它的分量 πxy = τxy、πyz = τyz 等則稱為剪切應力 (shear stresses)。嚴格來說,π 應稱為分子應力張量 (molecular stress tensor),τ 為黏滯應力張量 (viscous stress tensor)。必需一提的是,文獻中有兩種不同的應力符號規則 (stress sign conventions) 被使用,其中一派是遵循 Bird, Armstrong, and Hassager, Dynamics of Polymeric Fluids (Wiley 1986),也就是本文的用法, π = pI + τ 和 τ = - μ(▽v + (▽v)T),另一派是遵循一般工程的符號規則 (usual engineering sign convention),為 πe = - pI + τe 和 τe = + μ(▽v + (▽v)T)。兩種應力符號規則間的關係為 π = - πe 和 τ = - τe。
Table 1.2-1 分子應力 = 壓力 + 黏滯力
接下來我們想了解這些應力 (stresses) 該如何關聯至流體的速度梯度 (velocity gradients)? 為了廣義化 Eq. 1.1-2,我們對應力設下的限制如下
在廣義化的牛頓黏度定律表示式中 (Eq. 1.1-2),若欲表徵流體需要兩個係數,一個是黏度 μ,另一個是膨脹黏度 κ。通常在解流體力學的問題,我們不需要知道 κ 的值。因為如果流體是氣體,我們常假設其為理想的單原子氣體,其 κ 值為零。如果流體是液體,我們常假設其為不可壓縮 (incompressible),在第三章我們證明不可壓縮流體的 ▽∙v = 0,因此包含 κ 的項可以忽略。膨脹黏度在描述多原子氣體的聲波吸收 (sound absorption in polyatomic gases)、及描述含有氣泡的流體之流體動力學相當重要 (fluid dynamics of liquids containing gas bubbles)。
Equation 1.2-7 (或 1.2-6) 是一個很重要且常用的方程式,它於不同座標系的完整表示式列於下方表格。



(i) 黏滯應力是所有速度梯度的線性組合
 (1.2-3)
這裡的 81 個數值 μijkl 是黏度係數 (viscosity coefficients)。
(1.2-3)
這裡的 81 個數值 μijkl 是黏度係數 (viscosity coefficients)。
(ii) 我們宣稱時間導數和時間積分不應出現在表示式中 (但是對黏彈流體,這樣是不合理的)。
(iii) 如果流體處於單純的旋轉狀態 (pure rotation),我們不預期任何黏滯力會存在。這個要求導致一個必要的結果,那就是 τij 必需是速度梯度的對稱組合。這裡指的是,如果 i 和 j 互換,速度梯度的組合將不會改變,經證明唯有下方的速度梯度之對稱線性組合滿足上述要求
 (1.2-4)
(iv) 如果流體是等向性的 (isotropic),Eq. 1.2-4 兩個表示式前的係數需是純量,所以,τij 可表示為
(1.2-4)
(iv) 如果流體是等向性的 (isotropic),Eq. 1.2-4 兩個表示式前的係數需是純量,所以,τij 可表示為
 (1.2-5)
(1.2-5)
 (1.2-6)
(1.2-6)
 (1.2-7)
其中,δ 是單位張量 (unit tensor)、▽v 是速度梯度張量 (velocity gradient tensor)、(▽v)T 是速度梯度張量的轉置 (transpose)、(▽∙v) 是速度向量的散度 (divergence of the velocity vector, div v)。
(1.2-7)
其中,δ 是單位張量 (unit tensor)、▽v 是速度梯度張量 (velocity gradient tensor)、(▽v)T 是速度梯度張量的轉置 (transpose)、(▽∙v) 是速度向量的散度 (divergence of the velocity vector, div v)。
(1.2-3)(ii) 我們宣稱時間導數和時間積分不應出現在表示式中 (但是對黏彈流體,這樣是不合理的)。
(iii) 如果流體處於單純的旋轉狀態 (pure rotation),我們不預期任何黏滯力會存在。這個要求導致一個必要的結果,那就是 τij 必需是速度梯度的對稱組合。這裡指的是,如果 i 和 j 互換,速度梯度的組合將不會改變,經證明唯有下方的速度梯度之對稱線性組合滿足上述要求
(1.2-4)(1.2-5)
這裡我們已將黏度係數由 81 個減為 2 個!
(v) 當然,我們希望在簡單的剪切流場下,Eq. 1.2-5 可簡化成 Eq. 1.1-2。對於這個基礎的流場,Eq. 1.2-5 的確可簡化成 τyx = A (dvx/dy),因此這個純量常數 A 必需等於負號的黏度 μ。
(vi) 大部分的流體力學家均同意純量常數 B 可等於 2μ/3 - κ,其中 κ 為膨脹黏度 (dilatational viscosity)。B 的此表式示是基於動力學理論 (kinetic theory),對於低密度的單原子氣體,κ = 0。
因此,經廣義化牛頓黏度定律後 (Eq. 1.1-2),可以得到一組共九個的關係式 (六個是獨立的)
(1.2-6)
這裡,τij = τji (i 和 j 可分別為 1、2、3)。這些關係式可寫成更精簡的向量張量表示式如下
(1.2-7)在廣義化的牛頓黏度定律表示式中 (Eq. 1.1-2),若欲表徵流體需要兩個係數,一個是黏度 μ,另一個是膨脹黏度 κ。通常在解流體力學的問題,我們不需要知道 κ 的值。因為如果流體是氣體,我們常假設其為理想的單原子氣體,其 κ 值為零。如果流體是液體,我們常假設其為不可壓縮 (incompressible),在第三章我們證明不可壓縮流體的 ▽∙v = 0,因此包含 κ 的項可以忽略。膨脹黏度在描述多原子氣體的聲波吸收 (sound absorption in polyatomic gases)、及描述含有氣泡的流體之流體動力學相當重要 (fluid dynamics of liquids containing gas bubbles)。
Equation 1.2-7 (或 1.2-6) 是一個很重要且常用的方程式,它於不同座標系的完整表示式列於下方表格。



Reference: RB Bird, WE Stewart, EN Lightfoot, Transport Phenomena, 2nd ed (Wiley 2002).
翻譯的不錯 建議可以提到一些Notation的差異 比如很多流力書籍是定義πij = -pδij + τij
回覆刪除BSL特別跟別人不同
謝謝,已根據您的建議於文中簡單備註文獻中兩種不同的應力符號規則。
回覆刪除很高興有專業人士在這塊領域中文化做努力
回覆刪除最近在準備物辯國際賽,剛好在準備流體。謝謝這篇文章拯救了我
回覆刪除