
1. 簡介
在 1995 年,一個裝配有電子整流同步馬達 (electronically commutated synchronous motor; EC motor; 也稱無刷直流馬達 (brushless DC-motor)) 和數位訊號處理器科技 (digital signal processor, DSP) 的流變儀問世。裝配 EC 馬達的流變儀結合傳統 CR 和 CS 流變儀的好處,它的快速馬達控制如 CR 流變儀,而且因為扭矩直接來自於電流 (如同 CS 流變儀),所以 EC 馬達流變儀並不需要一個個別的扭矩傳感器。
至今,EC 馬達科技已超過 20 年,以下我們將簡單解釋這種獨特的驅動技術 (drive technique),討論現行流變儀的 EC 馬達和氣態軸承裝置 (air bearing assembly) 之細部組成及其性能 (specific configuration and performance),並呈現一些與當代流變研究相關之典型實驗。
2. 氣態軸承支援之電子整流 (EC) 同步馬達
DC 馬達結合光學編碼器 (optical encoder) 已被用於提供位置和速度 (position and speed) 的直接反饋控制中 (direct feedback control),此配置被稱為機械整流 (mechanical commutation)。DC 電流透過電刷 (brushes) 傳至轉子 (rotor),這種機械整流會造成摩擦,並限制最小的轉矩解析度至大約 0.5 mNm。為了避免這種機械摩擦,電子整流 (EC) 因而誔生,並發展成為用於流變儀的新馬達概念。EC 代表一種非接觸 (non-contact) 的方式去激發轉子,並可與氣態軸承 (air bearing) 結合,使極低扭矩的量測變成了可能。Figure 1 是典型馬達、氣態軸承、編碼器的裝置。
EC 馬達被稱為無刷 (brushless) DC 馬達,因為馬達電流被電子整流 (commutated electronically) 且沒有電刷或其它機械接觸來激發馬達。相反地,馬達被獨特的高通量密度永久磁鐵激發 (special permanent magnets with a high flux density)。它被稱為同步 (synchronous) 是因為轉子的旋轉速度和定子磁場 (stator field) 相同,因此與其同步。轉子磁場 (rotor field) 的產生是透過安裝於轉子各固定位置的高能量永久磁鐵。因為這些磁鐵的位置都是知道的,故轉子磁場為已知。
EC 控制使用上述技術,因此,透過此方法可使定子電流 (stator current) 之總量線性正比於電磁扭矩 (electromagnetic torque),即 M~Is。當變換定子電流將造成扭矩幾乎瞬間的改變,因此,在剪切應變 (shear strain) 或剪切速率 (shear rate) 量測,扭矩可以被快速調整並且無任何過衝現象 (overshoot)。對比之下,在托杯馬達,扭矩的產生是透過磁場對於轉子杯 (rotor cup) 的非瞬間誘發 (non-instantaneous induction)。在 EC 馬達流變儀,流場形變的預先設定值 (presetting) 和其對應的性質量測 (measuring of the corresponding properties) 是發生於儀器的同一側 (the same side of the instrument),故毋需額外的傳感器。
再者,因為 EC 馬達使用永久磁鐵於轉子,因為渦電流 (eddy currents) 造成的加熱 (heating) 問題不會像托杯馬達系統來的嚴重,因此,EC 馬達使得高扭矩的長時間量測具可行性。
3. 結果
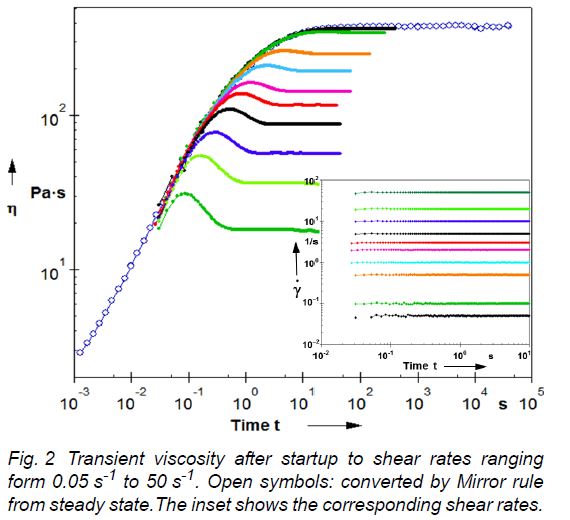
接下來介紹的所有量測都是在 Anton Parr 的 EC 馬達流變儀 (MCR) 所進行。Figure 2 是纏結高分子溶液 (entangled polymer solution) SRM 2409 於 0℃、不同剪切速率之暫態黏度 (transient viscosity at different shear rates) [1]。儀器於 30 ms 內調整至設定的剪切速率 (所需時間與剪切速率大小無關)。與根據 Gleissle's 鏡像定律 (Gleissle's mirror rule) 自穩態黏度曲線計算而來的極短時間數據比較 (開符號),所有實驗數據 (閉符號) 在短量測時間均與計算值重疊。
對於分支聚丙烯樣品 (branched polypropylene),Fig. 3 是 Sentmanat 拉伸流變儀 (Sentmanat Extensional Rheometer, SER) 之不同拉伸應變速率 (extensional strain rate) 隨時間變化的圖,由圖可知,儀器約可在 30 ms 之後達到設定的應變速率 (所需時間與應變速率大小無關)。Figure 3 的插圖可見暫態拉伸黏度明顯的增加,這是典型的應變硬化 (strain hardening)。

在 Fig. 4 的步階應變實驗中 (step strain experiments),我們可以看到兩個高分子溶液 (SRM 2490,以及一個聚苯乙烯 (polystyrene) 溶於鄰苯二甲酸二乙酯 (diethyl phthalate, DEP) 的溶液,PS5M06DEP) 在大應變下 (γ = 10) 的數據。透過編譯器訊號可得知馬達的角移動量 (angular movement of the motor),如此,樣品在實驗過程所受的完整應變歷史 (complete strain history) 都可被監測。應變 γ = 10 約在 50 ms 後達到,過程中只有設定值的大約 0.2% 極小應變過衝發生 (strain overshoot)。
與搭配有獨立扭矩傳感器的應變控制 (strain-controlled) 流變儀相比,EC 馬達的應力控制流變儀之扭矩訊號來自於馬達執行步階應變所需的電流。因為馬達控制器試圖以最快的速度施加應變,因此,在非常短時間的扭矩訊號將被控制器的動作所影響。
一開始馬達控制器施加一個很大的扭矩用來加速量測系統,約經 20 ms 後,它在反方向使用一個大的扭矩使系統再次慢下來,以達到想要的步階應變值。約經 60 ms 後,扭矩訊號不再繼續大幅改變,這表示用來執行步階應變的扭矩已不再那麼被需要了,此時的扭矩訊號則反應被拉伸高分子樣品的鬆弛過程 (relaxation process of the stretched polymer sample)。當達到設定的應變後,應變能維持在 0.002% 的設定值內 (γ = 10)。

4. 結論
5. 參考文獻
Reference: "On the use of EC-motors in rotational rheometers, relevant for MCR xx2 Series, MCR 92," Anton Paar Application Report.
配備有 EC 馬達的流變儀已商業化 20 餘年,並已完善建立。以 EC 馬達當作流變儀的驅動系統具有很重大的優點,因為它除了能使快速、暫態的應變和應變速率控制幾乎獨立於樣品特性 (nature of sample) 以及量測幾何 (measuring geometry),同時也能提供應力控制。這種獨特的馬達概念提供了前所未有的量測彈性和可能性。
5. 參考文獻
[1] National Institute of Standards and Technology (2006). Non-Newtonian polymer solution for rheological measurements: polyisobutylene dissolved in 2,6,10,14-tetramethylpentadecane. Certificate of analysis of the Standard Reference Material (SRM®) 2490, NIST, Gaithersburg.
沒有留言:
張貼留言